


目前有四種類型的傳感器為車輛提供外部和即時信息,每種傳感器都有優點和缺點。
傳感器類型是:
激光雷達 - 一種測量技術,通過用激光照射目標來測量距離。激光雷達是光探測和測距的。
雷達 - 一種物體探測系統,使用無線電波來確定物體的范圍,角度或速度。
超聲波 - 一種發射超聲波聲音的物體檢測系統,可以保存并檢測它們的返回以確定距離。
被動視覺 - 使用被動相機和復雜的物體檢測算法來了解相機可見的內容。
每種技術都有不同的優點和缺點。
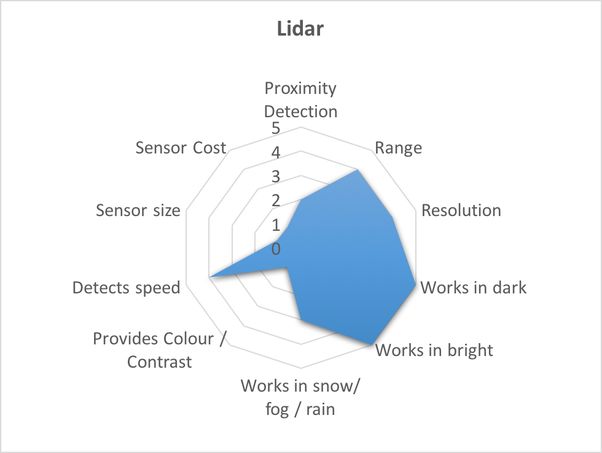
激光雷達目前是大而昂貴的系統,必須安裝在車輛外面。例如,Google必須安裝在車輛頂部,視線無障礙。目前的實施方案已經基本上從早期的30米范圍到150米到200米改進了范圍,同時分辨率也提高了。目前,具有更高范圍和分辨率的生產系統仍然是昂貴的。激光雷達在所有光線條件下都能很好地工作,但由于使用了光譜波長,它們開始因空氣中的雪,霧,雨和塵埃顆粒的增加而失效。激光雷達無法檢測顏色或對比度,也無法提供光學字符識別功能。
Quanergy展示了一種近乎量產的固態激光雷達系統,該系統預計有150米的范圍,250美元的成本和足夠的分辨率。該裝置仍然比所有其他傳感器大得多,而且價格昂貴,但價格和尺寸與預期的性能將使它成為一個非常有競爭力的傳感器,如果它生產。這個價格/性能點可能會讓它更有可能包含在特斯拉中,并且已經發現了一個安裝在頂部的傳統激光雷達的特斯拉Model S。
固態雷達芯片系統很常見,體積小,價格低廉。它們具有良好的范圍,但比其他傳感器的分辨率更差。它們在明暗條件下同樣工作良好,77 GHz系統能夠更好地感知霧,雨和雪,這會導致激光雷達和被動視覺系統的挑戰。與激光雷達一樣,雷達無法進行顏色,對比度或光學字符識別。雷達在確定當前實施中的交通相對速度方面非常有效。雖然傳感器尺寸使其更接近近距離探測,但它們在極短距離內的效率低于聲納。
超聲波傳感器主動發出高于人類聽覺水平的高頻聲音。它們具有非常差的范圍,但是對于非常近距離的三維映射非常好,因為聲波相對較慢,因此可以檢測到一厘米或更小的差異。無論光照水平如何,由于距離短,它們都可以在雪,霧和雨的條件下同樣良好地工作。與激光雷達和雷達一樣,它們不提供任何顏色,對比度或光學字符識別功能。由于它們的射程短,因此無法用于測量速度。它們小而便宜。
近年來,相機圖像識別系統變得非常便宜,小巧且高分辨率。它們的顏色,對比度和光學字符識別功能為其提供了一個全新的功能集,完全沒有其他所有傳感器。它們具有最佳的傳感器范圍,但光線條件良好。它們的范圍和性能隨著光線水平變暗而降低,開始依賴于 - 就像人眼一樣 - 依賴于汽車前燈的光線。在非常明亮的條件下,一些實施顯然可能無法識別明亮天空下的輕物體,據報道這是2016年5月特斯拉自動駕駛儀相關死亡事故的一個因素在佛羅里達州 數字信號處理可以確定速度,但不能達到雷達或激光雷達系統的精度水平。
沒有一種解決方案是完美的,每種組合的解決方案都有妥協。傳感器技術將以不同的方式在不同的車輛價格點組合,從而獲得有效的解決方案。

地址:深圳市龍華區東環一路天匯大廈B棟1028室
QQ:2775887586 ? ? ? ? ? TEL:0755-83422736
技術支持:凱鼎電子???粵ICP備16123236號-1
? 2010-2017 K-DING ELECTRONIC CO.,LTD All rights reserved.





